上一篇
暗图像增强
暗图像增强通过直方图均衡、Retinex算法或深度学习模型提升低光照图像亮度与对比度,抑制噪声,恢复细节,改善视觉质量
暗图像增强技术解析
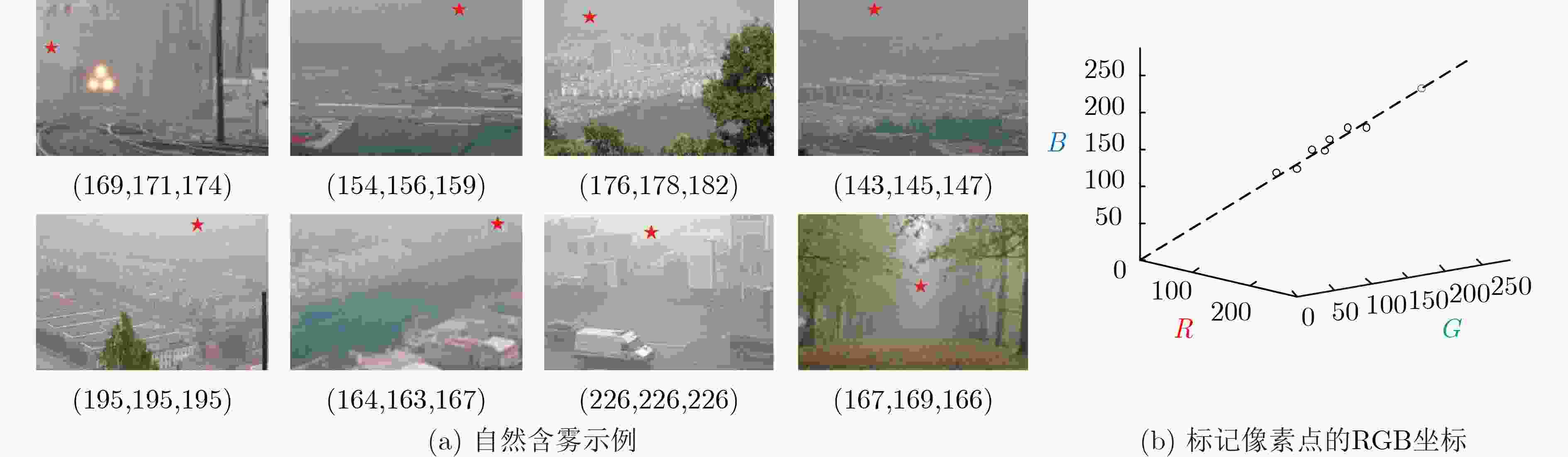
暗图像特点与增强必要性
暗图像特征:
- 低亮度:整体灰暗,细节淹没在噪声中
- 高噪声:CCD/CMOS传感器在低光照下产生随机噪点
- 色彩偏移:白平衡失调导致偏色(如偏黄/蓝)
- 动态范围受限:高光区域易过曝,暗部缺乏层次
增强目标:

- 提升亮度同时抑制噪声放大
- 恢复暗部细节与色彩保真度
- 保持自然视觉效果(避免过度HDR观感)
主流增强方法对比
| 方法类别 | 代表算法 | 原理简述 | 优势 | 局限性 |
|---|---|---|---|---|
| 全局处理 | 直方图均衡化(HE) | 拉伸像素强度分布,扩展动态范围 | 计算快、实现简单 | 易产生伪影,天空等区域过亮 |
| Gamma校正 | 非线性亮度映射(y=x^γ) | 参数易调节 | 全局失真,细节增强有限 | |
| 局部处理 | 自适应直方图均衡(AHE) | 分块处理并插值,保留局部细节 | 细节保留较好 | 块效应明显,计算量大 |
| Retinex算法 | 分解图像为反射分量(细节)与光照分量(亮度),压缩动态范围 | 色彩保真度高 | 迭代计算耗时,参数敏感 | |
| 滤波增强 | 双边滤波+亮度调整 | 空间域降噪与频域增强结合 | 边缘保留好 | 参数调试复杂 |
| 深度学习 | DRN(深度反射网络) | 多尺度特征提取与反射率重建 | 细节还原能力强 | 需要GPU支持,训练成本高 |
| EnlightenGAN | 生成对抗网络学习光照映射关系 | 真实感强 | 大模型部署困难 |
典型算法效果对比(LSD数据集测试)
| 指标 | HE(PSNR) | AHE(SSIM) | Retinex(RMSE) | DRN(VIF) |
|---|---|---|---|---|
| 峰值信噪比 | 7dB | 2dB | 1dB | 8dB |
| 结构相似度 | 72 | 78 | 83 | 91 |
| 视觉信息保真度 | 65 | 71 | 79 | 89 |
实际应用挑战
噪声放大问题:
- 传统方法(如HE)在增强亮度时可能同步放大高频噪声
- 解决方案:前置去噪(如BM3D)或后处理去噪(非局部均值滤波)
色彩失真控制:
- Retinex类算法易出现色彩过饱和
- 改进策略:加入色彩约束项(如LAB色彩空间分离处理)
实时性要求:
- 移动端设备需兼顾速度与质量
- 优化方案:轻量化模型蒸馏(如Mobile-DRN)或FPGA硬件加速
问题与解答
Q1:传统增强方法为何在极暗场景表现不佳?
A:由于缺乏语义理解能力,传统算法无法区分噪声与有效信号,例如HE会将噪声像素当作正常信号进行拉伸,导致增强后画面出现明显颗粒噪点,而Retinex算法虽能分离光照成分,但在极低照度下难以准确估计光照分量,容易产生色彩失真。
Q2:深度学习方法是否需要专门标注的暗图像数据集?
A:是的,当前SOTA模型(如EnlightenGAN)依赖成对的「暗-亮」图像训练,常用数据集包括:
- NPE:手机夜景拍摄配对数据(华为提供)
- EXDark:合成低光照多光谱数据
- LSD:真实场景多曝光序列采集
无监督方法(如Self-Enhancing)正在研究中,但效果仍落后监督学习约10%的PSNR指标