上一篇
光学筛选机图像处理技术
光学筛选机图像处理技术通过工业相机采集图像,经算法对图像预处理、特征提取与分析,精准识别产品缺陷、尺寸等,保障检测高效与
光学筛选机图像处理技术
光学筛选机是一种利用光学原理对物体进行检测和筛选的设备,广泛应用于工业制造、电子、食品、医药等领域,其核心在于图像处理技术,通过对采集到的图像进行分析和处理,实现对物体的尺寸、形状、颜色、缺陷等特征的检测和识别,从而判断物体是否符合要求,并进行分类或剔除。

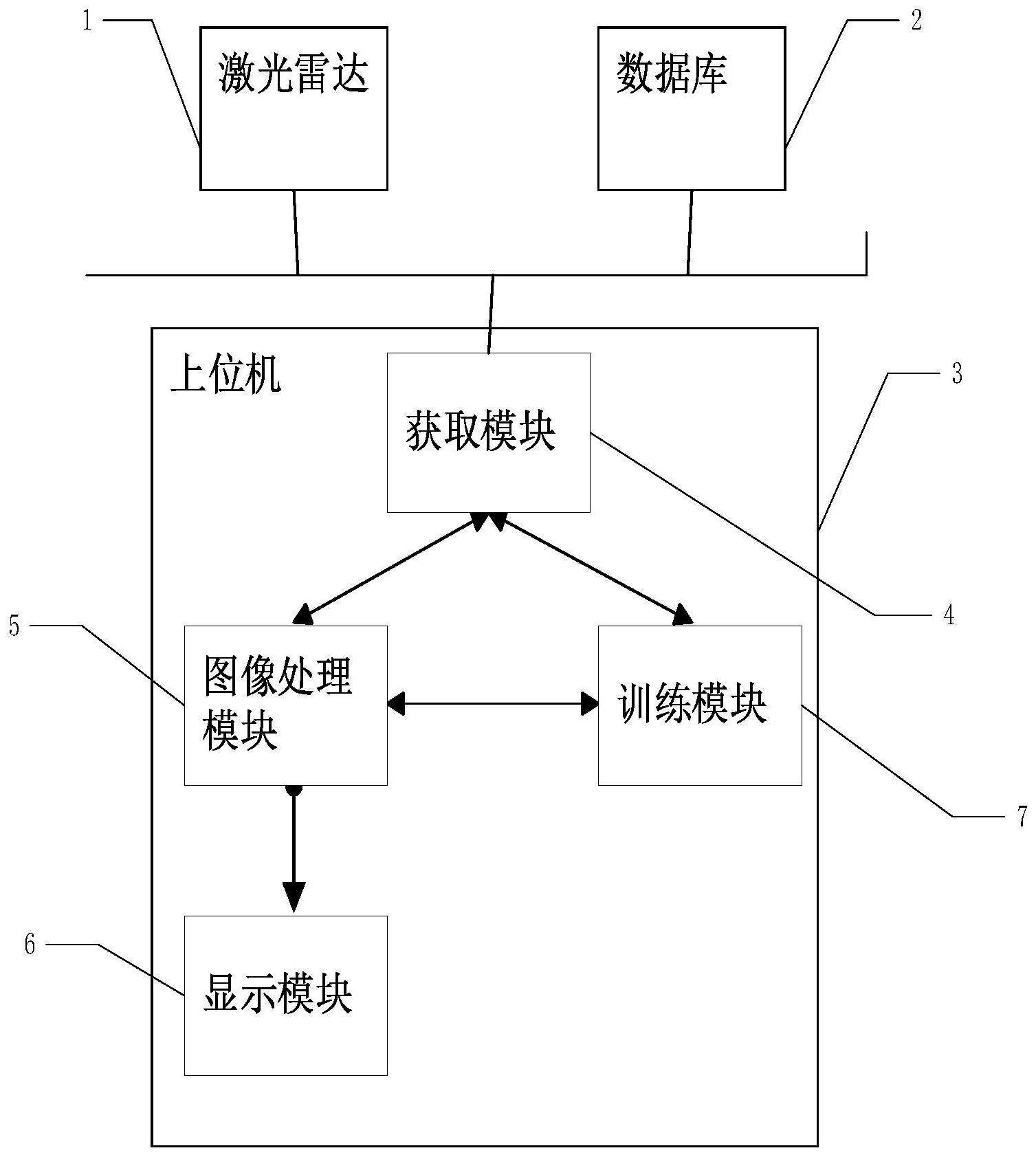
光学筛选机图像处理系统的组成
| 组成部分 | 功能描述 |
|---|---|
| 光学成像系统 | 包括光源、光学镜头等,负责照亮被测物体并形成清晰的图像,光源的选择要考虑亮度、均匀性、颜色等因素,以确保获取高质量的图像,光学镜头的焦距、光圈等参数则影响图像的分辨率和景深。 |
| 图像采集系统 | 通常由相机(如CCD或CMOS相机)和图像采集卡组成,相机负责将光学图像转换为电信号,图像采集卡则将电信号数字化并传输到计算机进行处理,相机的分辨率、帧率等参数决定了图像的清晰度和采集速度。 |
| 图像处理系统 | 这是光学筛选机的核心部分,运行在计算机上,它接收图像采集系统传输的数字图像,并运用各种图像处理算法对图像进行分析和处理,提取出物体的特征信息,与预设的标准进行比较,判断物体是否合格。 |
| 执行机构 | 根据图像处理系统的检测结果,执行机构负责对不合格的物体进行分类、剔除或其他操作,常见的执行机构包括气动推杆、电磁阀、机械臂等。 |
光学筛选机图像处理的关键技术
(一)图像预处理
- 去噪:在图像采集过程中,由于环境光线、相机传感器等原因,图像可能会受到噪声的干扰,常用的去噪方法有均值滤波、中值滤波、高斯滤波等,均值滤波是将图像中每个像素的值替换为其周围像素的平均值,简单易实现,但可能会使图像边缘模糊;中值滤波是将像素的值替换为其周围像素值的中值,对椒盐噪声有很好的去除效果;高斯滤波则是根据高斯函数对图像进行加权平均,能有效地去除高斯噪声,同时保留图像的边缘信息。
- 灰度化:彩色图像包含大量的颜色信息,为了简化处理,通常将彩色图像转换为灰度图像,灰度化的方法有最大值法、平均值法、加权平均值法等,加权平均值法根据人眼对不同颜色敏感度的不同,对红、绿、蓝三个通道赋予不同的权重,一般常用的权重为0.299、0.587、0.114,即$Gray = 0.299R + 0.587G + 0.114B$。
- 图像增强:为了提高图像的对比度和清晰度,便于后续的处理,需要对图像进行增强,常用的方法有直方图均衡化、对比度拉伸等,直方图均衡化是通过调整图像的灰度分布,使图像的直方图尽可能均匀,从而提高图像的对比度;对比度拉伸则是通过线性或非线性变换,将图像的灰度范围扩展到更大的区间,增强图像的视觉效果。
(二)目标识别与定位
- 边缘检测:边缘是图像中物体的重要特征,通过边缘检测可以找到物体的边界,常见的边缘检测算子有Sobel算子、Prewitt算子、Canny算子等,Sobel算子和Prewitt算子都是基于梯度的方法,通过计算图像中每个像素的梯度来确定边缘的位置,但对噪声比较敏感;Canny算子则是一种多阶段的优化算法,先对图像进行高斯滤波去噪,然后计算梯度,再通过非极大值抑制和双阈值处理得到精细的边缘。
- 阈值分割:阈值分割是将图像中的像素根据其灰度值分为不同的类别,从而实现目标与背景的分离,常用的阈值选取方法有全局阈值法(如Otsu法)和局部阈值法,Otsu法是一种自动确定阈值的方法,它通过计算图像的类间方差,选择使类间方差最大的阈值作为分割阈值;局部阈值法则是根据图像的局部特性动态地确定阈值,适用于光照不均匀等情况。
- 模板匹配:当需要检测特定形状或模式的物体时,可以使用模板匹配的方法,模板匹配是将预先定义的模板与图像中的各个区域进行比较,计算它们之间的相似度,相似度最高的区域即为匹配的目标,模板匹配的方法有基于灰度的归一化互相关匹配、基于特征的匹配等。
(三)特征提取与分析
- 形状特征提取:形状特征是物体的重要特征之一,包括面积、周长、圆形度、矩形度等,面积可以通过计算图像中目标区域的像素个数得到;周长可以通过计算目标区域边界的像素长度得到;圆形度是物体形状与圆形的接近程度,计算公式为$C = frac{4pi A}{P^2}$,A$为面积,$P$为周长;矩形度是物体形状与矩形的接近程度,计算公式为$R = frac{A}{Wtimes H}$,W$和$H$分别为物体的外接矩形的宽度和高度。
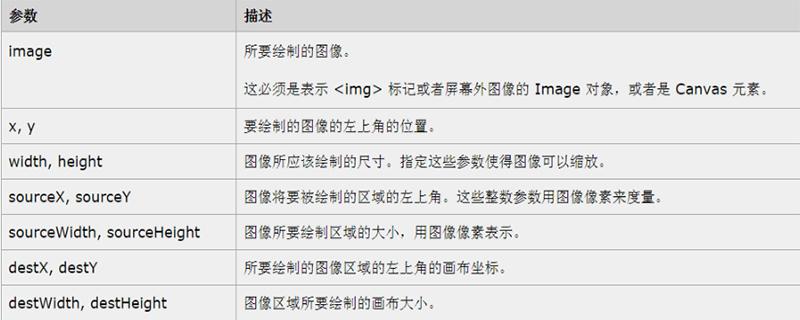
- 尺寸测量:通过图像处理可以精确地测量物体的尺寸,如长度、宽度、直径等,尺寸测量的方法有基于像素的测量和基于标定的测量,基于像素的测量是根据图像中物体的像素个数和相机的分辨率来计算物体的实际尺寸,但这种方法容易受到相机畸变和物体位置的影响;基于标定的测量是先通过已知尺寸的标准物体对相机进行标定,得到相机的内部参数和外部参数,然后根据这些参数计算出物体的实际尺寸,精度较高。
- 颜色特征提取:颜色是物体的另一个重要特征,可以通过计算图像中物体的颜色均值、方差、直方图等来描述其颜色特征,颜色均值可以反映物体的整体颜色倾向,方差可以反映颜色的离散程度,直方图可以显示颜色在各个灰度级的分布情况。
- 缺陷检测:缺陷检测是光学筛选机的重要应用之一,常见的缺陷有划痕、裂纹、孔洞、异物等,缺陷检测的方法有基于阈值的检测、基于边缘的检测、基于纹理的检测等,基于阈值的检测是通过设定一个阈值,将图像中灰度值超出阈值的区域视为缺陷;基于边缘的检测是通过检测物体边缘的不连续性来判断是否存在缺陷;基于纹理的检测是通过分析图像的纹理特征,如灰度共生矩阵、局部二值模式等,来检测缺陷。
(四)结果输出与执行
- 结果判定:根据提取的特征与预设的标准进行比较,判断物体是否合格,如果物体的特征符合标准,则判定为合格;否则,判定为不合格。
- 执行操作:对于不合格的物体,执行机构会根据检测结果进行相应的操作,如将其剔除或分类到指定的区域,执行机构的动作可以通过计算机控制,根据物体的位置和状态精确地进行操作。
光学筛选机图像处理技术的应用优势
- 高精度:能够检测出微小的尺寸差异、形状缺陷和颜色变化,精度可以达到微米甚至纳米级别,远高于人工检测的精度。
- 高效率:可以在短时间内对大量物体进行检测,检测速度可以达到每秒数十个甚至上百个,大大提高了生产效率。
- 稳定性:不受人为因素(如疲劳、情绪、经验等)的影响,能够长时间稳定地工作,保证了检测结果的一致性和可靠性。
- 适应性强:可以根据不同的检测对象和要求,灵活地调整光学系统、图像处理算法和执行机构,适用于各种形状、尺寸和材质的物体检测。
光学筛选机图像处理技术的实际案例
| 案例名称 | 检测对象 | 技术要点 | |
|---|---|---|---|
| 汽车零部件检测 | 汽车发动机缸体、曲轴、活塞等 | 尺寸精度、表面缺陷(如划痕、气孔、砂眼等)、形状误差 | 采用高分辨率相机和远心光学镜头,保证图像的清晰度和准确性;运用边缘检测、阈值分割和形态学处理等算法进行缺陷检测;通过标定技术实现高精度的尺寸测量。 |
| 电子元件检测 | 集成电路芯片、电阻、电容等 | 外观缺陷(如引脚缺失、封装破损等)、尺寸偏差、字符识别 | 使用合适的光源(如环形光源)突出元件的特征;利用模板匹配进行字符识别;通过亚像素算法提高尺寸测量的精度。 |
| 食品包装检测 | 饼干、糖果、方便面等食品的包装 | 包装完整性、印刷质量、封口缺陷 | 采用彩色相机获取高质量的图像;运用颜色空间转换和阈值分割检测包装的颜色异常;通过边缘检测和形态学分析判断封口是否严密。 |
相关问题与解答
问题1:光学筛选机的检测精度主要受哪些因素影响?
答:光学筛选机的检测精度受多种因素影响,主要包括以下几个方面:
- 光学系统:光源的亮度、均匀性和稳定性会影响图像的质量,进而影响检测精度;光学镜头的分辨率、畸变等参数也决定了图像的清晰度和准确性。
- 相机性能:相机的分辨率、灵敏度、帧率等参数直接影响图像的采集效果,分辨率越高,能够捕捉到的细节越多;灵敏度越高,在低光照条件下也能获取清晰的图像;帧率越高,检测速度越快,但同时也要保证图像的质量。
- 图像处理算法:算法的精度和稳定性对检测结果至关重要,边缘检测算法的准确性会影响物体轮廓的提取,从而影响尺寸测量和形状分析的精度;特征提取算法的合理性会决定能否准确地描述物体的特征,以及与标准的比较结果。
- 标定精度:在进行尺寸测量等需要精确定量的检测时,相机的标定精度会直接影响测量结果的准确性,标定过程中的误差会传递到最终的检测结果中,因此需要采用高精度的标定方法和设备。
- 被测物体的特性:物体的表面光泽度、颜色、纹理等特性会影响光线的反射和散射,从而影响图像的质量和特征提取的难度,光滑表面的物体可能会产生镜面反射,导致局部区域过亮或过暗,增加图像处理的难度;颜色复杂或纹理丰富的物体可能会使特征提取变得困难,降低检测精度。
问题2:如何提高光学筛选机在复杂环境下的检测准确性?
答:在复杂环境下,光学筛选机的检测准确性可能会受到多种因素的干扰,如光照不均匀、背景复杂、物体重叠等,为了提高检测准确性,可以采取以下措施:
- 优化光学系统:根据复杂环境的特点,选择合适的光源和光学镜头,对于光照不均匀的情况,可以采用多个光源组合或使用漫射板来均匀照明;对于背景复杂的场景,可以选择具有低角度敏感性和抗干扰能力的光学镜头,减少背景对图像的影响。
- 改进图像预处理算法:针对复杂环境中的噪声、光照变化等问题,采用更先进的图像预处理算法,在去噪方面,可以结合多种滤波方法,如先使用中值滤波去除椒盐噪声,再使用高斯滤波去除高斯噪声;在灰度化和图像增强方面,可以根据图像的局部特性进行自适应处理,提高图像的对比度和清晰度。
- 增强目标识别与定位能力:在复杂背景下,目标识别与定位的难度会增加,可以采用多特征融合的方法,结合形状、颜色、纹理等多种特征来提高目标识别的准确性;利用机器学习和深度学习算法,通过对大量样本的学习,让系统能够自动适应复杂环境的变化,提高目标识别和定位的能力。
- 实时环境监测与补偿:在检测过程中,实时监测环境的变化,如光照强度、温度等,并根据这些变化对检测结果进行补偿,当光照强度发生变化时,可以通过调整相机的曝光时间或增益来保持图像的亮度稳定;当温度变化导致物体尺寸发生变化时,可以根据预先建立的温度-尺寸模型进行修正。
- 数据融合与多传感器协同:除了光学传感器外,还可以结合其他传感器(如激光传感器、超声波传感器等)获取的信息,进行数据融合,不同传感器具有不同的优势和局限性,通过数据融合可以综合利用各种信息,提高检测的准确性和可靠性,激光传感器可以提供物体的三维轮廓信息,与光学图像相结合,可以更准确地识别物体的形状和尺寸